Dynamic Window Approach¶
![]()
References:
import math
from enum import Enum
import matplotlib.pyplot as plt
import numpy as np
show_animation = True
车辆本身参数,包括形状(圆形、长方形)、最大/最小速度等:
class RobotType(Enum):
circle = 0
rectangle = 1
class Config:
"""
simulation parameter class
"""
def __init__(self):
# robot parameter
self.max_speed = 1.0 # [m/s]
self.min_speed = -0.5 # [m/s]
self.max_yaw_rate = 40.0 * math.pi / 180.0 # [rad/s]
self.max_accel = 0.2 # [m/ss]
self.max_delta_yaw_rate = 40.0 * math.pi / 180.0 # [rad/ss]
self.v_resolution = 0.01 # [m/s]
self.yaw_rate_resolution = 0.1 * math.pi / 180.0 # [rad/s]
self.dt = 0.1 # [s] Time tick for motion prediction
self.predict_time = 3.0 # [s]
self.to_goal_cost_gain = 0.15
self.speed_cost_gain = 1.0
self.obstacle_cost_gain = 1.0
self.robot_stuck_flag_cons = 0.001 # constant to prevent robot stucked
self.robot_type = RobotType.circle
# if robot_type == RobotType.circle
# Also used to check if goal is reached in both types
self.robot_radius = 1.0 # [m] for collision check
# if robot_type == RobotType.rectangle
self.robot_width = 0.5 # [m] for collision check
self.robot_length = 1.2 # [m] for collision check
# obstacles [x(m) y(m), ....]
self.ob = np.array([[-1, -1],
[0, 2],
[4.0, 2.0],
[5.0, 4.0],
[5.0, 5.0],
[5.0, 6.0],
[5.0, 9.0],
[8.0, 9.0],
[7.0, 9.0],
[8.0, 10.0],
[9.0, 11.0],
[12.0, 13.0],
[12.0, 12.0],
[15.0, 15.0],
[13.0, 13.0]
])
@property
def robot_type(self):
return self._robot_type
@robot_type.setter
def robot_type(self, value):
if not isinstance(value, RobotType):
raise TypeError("robot_type must be an instance of RobotType")
self._robot_type = value
运动方程¶
状态\(\mathbf{x}\):位置\(x\)(m)、位置\(y\)(m)、航向角\(\theta\)(rad)、速度\(v\)(m/s)、角速度\(\omega\)(rad/s)。
控制量\(\mathbf{u}\):加速度、角速度。
这里假设车辆(近似)在\(\Delta t\)间隔内的速度与角速度是常数:
def motion(x, u, dt):
"""
motion model
"""
x[2] += u[1] * dt # 航向角
x[0] += u[0] * math.cos(x[2]) * dt # 位置x
x[1] += u[0] * math.sin(x[2]) * dt # 位置y
x[3] = u[0] # 加速度
x[4] = u[1] # 角速度
return x
轨迹预测¶
def predict_trajectory(x_init, v, y, config):
"""predict trajectory with an input
@v, 加速度
@y, 角速度
"""
x = np.array(x_init)
trajectory = np.array(x)
time = 0
while time <= config.predict_time:
x = motion(x, [v, y], config.dt)
trajectory = np.vstack((trajectory, x))
time += config.dt
return trajectory
运动轨迹模拟¶
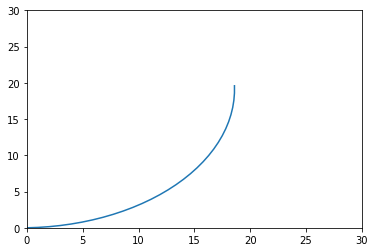
假设车辆初始时刻所有状态为0,然后以\(10m/s^2\)的加速度和\(30^\circ/s\)的角速度行驶3秒钟:
import matplotlib.pyplot as plt
x = np.array([0.0, 0.0, 0.0, 0.0, 0.0])
u = np.array([10.0, np.deg2rad(30)])
config = Config()
# config.dt = 0.01 # Unit: second
config.predict_time = 3
x_hst = predict_trajectory(x, u[0], u[1], config)
plt.plot(x_hst[:, 0], x_hst[:, 1])
plt.xlim(0, 30)
plt.ylim(0, 30)
plt.show()
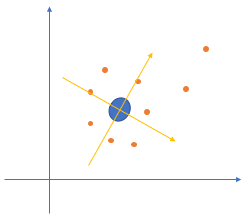
动态窗口确定动作搜索空间¶
车辆本身运动参数\(v, \omega\)(速度,角速度)集合\(V_s\):\([v_{max}, v_{min}, \omega_{max}, \omega_{min}]\)
动态窗口运动参数集合\(V_d\):\([v'_{max}, v'_{min}, \omega'_{max}, \omega'_{min}]\),其中\(v'_{max} = v + a_{max} \Delta t\),\(v'_{min} = v - a_{max} \Delta t\),角速度变化范围类似。公式如下:
算法搜索的动态空间为两者交集:
calc_dynamic_window(),当给定状态\(x\)时,根据所定义的机器人的最大加速度和最大转向加速度,给出一个缩小的动作空间dw,它是由机器人自身扭力矩大小所完全确定的,下一时刻所能到达的动作空间,大大提高了搜索速度。
该窗口仅包含下一个时间间隔内可以达到的速度,动态窗口外的所有轨迹都不能在下一个时间间隔内达到,因此可以不考虑避障。
def calc_dynamic_window(x, config):
"""
calculation dynamic window based on current state x
"""
# Dynamic window from robot specification
Vs = [config.min_speed, config.max_speed,
-config.max_yaw_rate, config.max_yaw_rate]
# Dynamic window from motion model
Vd = [x[3] - config.max_accel * config.dt,
x[3] + config.max_accel * config.dt,
x[4] - config.max_delta_yaw_rate * config.dt,
x[4] + config.max_delta_yaw_rate * config.dt]
# [v_min, v_max, yaw_rate_min, yaw_rate_max]
dw = [max(Vs[0], Vd[0]), min(Vs[1], Vd[1]),
max(Vs[2], Vd[2]), min(Vs[3], Vd[3])]
return dw
轨迹目标函数¶
目标函数包含三部分:
距离代价¶
车辆行驶过程中距离障碍物越远越好:
计算轨迹点和障碍物的距离:
a[:, None]扩展第二维度为1。例如a.shape=(3,2),那么a[:, None].shape=(3,1,2)
# 障碍物坐标,数量为3
ob = np.array([[-1, -1],
[0, 2],
[4.0, 2.0]])
ox = ob[:, 0] # shape: (3,)
oy = ob[:, 1] # shape: (3,)
# 历史轨迹,数量为5
config.predict_time = config.dt * (5-2)
trajectory = predict_trajectory(x, u[0], u[1], config)
# ox[:, None]扩展了ox的shape为(3, 1)
dx = trajectory[:, 0] - ox[:, None]
dy = trajectory[:, 1] - oy[:, None]
print(trajectory[:, 0].shape, ox[:, None].shape, dx.shape)
(5,) (3, 1) (3, 5)
结果显示dx.shape=(3,5),表示3个障碍物分别和5个轨迹点的x距离。
(a) 如果车辆是圆形,直接计算hypotenuse(\(r = \sqrt{dx^2 + dy^2}\)):
r = np.hypot(dx, dy)
r.shape
(3, 5)
根据公式计算距离代价:
if np.array(r <= config.robot_radius).any():
Lo = float("Inf")
else:
Lo = 1.0 / np.min(r)
print("Cost of obstacle is:", Lo)
Cost of obstacle is: 0.7071067811865475
(b) 如果车辆是长方形,需要考虑车辆方向,首先计算出每个轨迹点方向的旋转矩阵:
yaw = trajectory[:, 2]
# 构建旋转矩阵
rot = np.array([[np.cos(yaw), -np.sin(yaw)],
[np.sin(yaw), np.cos(yaw)]])
# shape: (2, 2, n) => (n, 2, 2)
print("Before transpose, the shape is:", rot.shape)
rot = np.transpose(rot, [2, 0, 1])
print("After transpose, the shape is:", rot.shape)
Before transpose, the shape is: (2, 2, 5)
After transpose, the shape is: (5, 2, 2)
然后计算所有障碍物分别在每个轨迹点车辆坐标系下的距离,分为2步:
计算障碍物在原点坐标系下和每个轨迹点的距离(不考虑旋转)\((dx, dy)\)
将\(dx, dy\)转换到每个轨迹点车辆坐标系下表示:\(R \cdot [dx, dy]^T\)
# 1. 计算障碍物在原点坐标系下和每个轨迹点的距离(不考虑旋转)
# shape: (5, 3, 2) = (5, 1, 2) - (3, 2)
local_ob = trajectory[:, None, 0:2] - ob
print(local_ob.shape)
# 2. 将障碍物距离转换到车辆坐标系下(3, 5, 2) @ (5, 2, 2)
local_ob = np.array([l @ x for l, x in zip(local_ob, rot)])
print(local_ob.shape)
(5, 3, 2)
(5, 3, 2)
结果(5, 3, 2)为3个障碍物分别在5个轨迹点坐标系下的表示。
最后在自己坐标系下直接和本车长宽比较就可以了。
这一节所有代码封装至calc_obstacle_cost()函数中:
def calc_obstacle_cost(trajectory, ob, config):
"""
calc obstacle cost inf: collision
"""
ox = ob[:, 0]
oy = ob[:, 1]
dx = trajectory[:, 0] - ox[:, None]
dy = trajectory[:, 1] - oy[:, None]
r = np.hypot(dx, dy)
if config.robot_type == RobotType.rectangle:
yaw = trajectory[:, 2]
# 构建旋转矩阵
rot = np.array([[np.cos(yaw), -np.sin(yaw)],
[np.sin(yaw), np.cos(yaw)]])
# shape: (2, 2, n) => (n, 2, 2)
rot = np.transpose(rot, [2, 0, 1])
local_ob = ob[:, None] - trajectory[:, 0:2]
local_ob = local_ob.reshape(-1, local_ob.shape[-1])
local_ob = np.array([local_ob @ x for x in rot])
# 1. 计算障碍物在原点坐标系下和每个轨迹点的距离(不考虑旋转)
# n_t: number of trajectory; n_o: number of obstacles
# shape: (n_t, n_o, 2) = (n_t, 1, 2) - (n_o, 2)
local_ob = trajectory[:, None, 0:2] - ob
# 2. 将障碍物距离转换到车辆坐标系下,每次循环:(n_o, 2) X (2, 2)
local_ob = np.array([l @ x for l, x in zip(local_ob, rot)])
# shape (n_t, n_o, 2) => (n_t*n_o, 2)
local_ob = local_ob.reshape(-1, local_ob.shape[-1])
upper_check = local_ob[:, 0] <= config.robot_length / 2
right_check = local_ob[:, 1] <= config.robot_width / 2
bottom_check = local_ob[:, 0] >= -config.robot_length / 2
left_check = local_ob[:, 1] >= -config.robot_width / 2
if (np.logical_and(np.logical_and(upper_check, right_check),
np.logical_and(bottom_check, left_check))).any():
return float("Inf")
elif config.robot_type == RobotType.circle:
if np.array(r <= config.robot_radius).any():
return float("Inf")
min_r = np.min(r)
return 1.0 / min_r # OK
目标方向代价¶
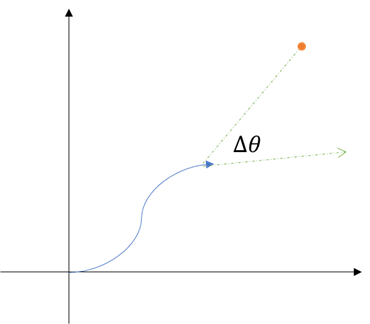
行进方向与目标方向的夹角越小越好。
需要注意的是\(\Delta \theta\)有可能超过180度,所以需要取180度的余数abs(cost_angle) % np.pi,也有代码中使用下面这种方式取余数:
\(cost = \arctan2(\sin(\theta), \cos(\theta))\)
def calc_to_goal_cost(trajectory, goal):
"""calc to goal cost with angle difference
"""
dx = goal[0] - trajectory[-1, 0] # 取轨迹最后一个点
dy = goal[1] - trajectory[-1, 1]
goal_angle = math.atan2(dy, dx) # 目标角度
cost_angle = goal_angle - trajectory[-1, 2] # 减去当前车辆航向角
# OR:cost = abs(cost_angle) % np.pi
cost = abs(math.atan2(math.sin(cost_angle), math.cos(cost_angle)))
return cost
模拟实验¶
假设目标点为(20, 20),轨迹最后一个点为(10, 10),航向角为45度,那么差值应该为0:
trajectory = np.array([[10, 10, np.deg2rad(45)]])
goal = np.array([20, 20])
calc_to_goal_cost(trajectory, goal)
0.0
速度代价¶
这一项最简单,也就是车辆速度越大越好:
trajectory = np.array([[10, 10, np.deg2rad(45), 0]]) # 第四项为速度
config.max_speed - trajectory[-1, 3]
1.0
遍历搜索¶
至此,当给定状态x、一个动态窗口dw、目标位置、障碍物位置时,只需要对动态窗口dw内的动作空间(速度\(v\)和角速度\(\omega\))进行遍历,计算出每一个可能的动作在未来一段时间内所产生的轨迹,并在所有轨迹里找出一条评价最高的轨迹,返回最佳动作和最佳轨迹。
防止陷入局部最优¶
一般情况下车辆应该朝着目标方向前进,但是当前方有障碍物时并且车辆朝向指向目标,此时一种可能的局部最优解:速度为0、方向为0(即角速度为0),此时强制让车辆调整朝向,代码如下:
if v < config.robot_stuck_flag_cons \
omega < config.robot_stuck_flag_cons:
omega = -config.max_delta_yaw_rate
def calc_control_and_trajectory(x, dw, config, goal, ob):
"""
calculation final input with dynamic window
"""
x_init = x[:]
min_cost = float("inf")
best_u = [0.0, 0.0]
best_trajectory = np.array([x])
# evaluate all trajectory with sampled input in dynamic window
for v in np.arange(dw[0], dw[1], config.v_resolution):
for y in np.arange(dw[2], dw[3], config.yaw_rate_resolution):
trajectory = predict_trajectory(x_init, v, y, config)
# calc cost
to_goal_cost = config.to_goal_cost_gain * calc_to_goal_cost(trajectory, goal)
speed_cost = config.speed_cost_gain * (config.max_speed - trajectory[-1, 3])
ob_cost = config.obstacle_cost_gain * calc_obstacle_cost(trajectory, ob, config)
final_cost = to_goal_cost + speed_cost + ob_cost
# search minimum trajectory
if min_cost >= final_cost:
min_cost = final_cost
best_u = [v, y]
best_trajectory = trajectory
if abs(best_u[0]) < config.robot_stuck_flag_cons \
and abs(x[3]) < config.robot_stuck_flag_cons:
# to ensure the robot do not get stuck in
# best v=0 m/s (in front of an obstacle) and
# best omega=0 rad/s (heading to the goal with
# angle difference of 0)
best_u[1] = -config.max_delta_yaw_rate
return best_u, best_trajectory
初始化¶
初始化状态x:位置x(m)、位置y(m)、航向角yaw(rad)、速度v(m/s)、角速度w(rad/s)
目标位置goal:gx,gy
仿真参数config:最大/最小速度、拐弯半径、障碍物等
# initial state [x(m), y(m), yaw(rad), v(m/s), omega(rad/s)]
x = np.array([0.0, 0.0, math.pi / 8.0, 0.0, 0.0])
# goal position [x(m), y(m)]
goal = np.array([10.0, 10.0])
# input [forward speed, yaw_rate]
config.robot_type = RobotType.circle
trajectory = np.array(x)
config = Config()
障碍物位置:
ob = config.ob # obstacles [[x(m) y(m)], ....]
ob
array([[-1., -1.],
[ 0., 2.],
[ 4., 2.],
[ 5., 4.],
[ 5., 5.],
[ 5., 6.],
[ 5., 9.],
[ 8., 9.],
[ 7., 9.],
[ 8., 10.],
[ 9., 11.],
[12., 13.],
[12., 12.],
[15., 15.],
[13., 13.]])
模拟实验¶
def plot_arrow(x, y, yaw, length=0.5, width=0.1): # pragma: no cover
plt.arrow(x, y, length*math.cos(yaw), length*math.sin(yaw),
head_length=width, head_width=width)
plt.plot(x, y)
def plot_robot(x, y, yaw, config): # pragma: no cover
if config.robot_type == RobotType.rectangle:
outline = np.array([[-config.robot_length / 2, config.robot_length / 2,
(config.robot_length / 2), -config.robot_length / 2,
-config.robot_length / 2],
[config.robot_width / 2, config.robot_width / 2,
- config.robot_width / 2, -config.robot_width / 2,
config.robot_width / 2]])
Rot1 = np.array([[math.cos(yaw), math.sin(yaw)],
[-math.sin(yaw), math.cos(yaw)]])
outline = (outline.T.dot(Rot1)).T
outline[0, :] += x
outline[1, :] += y
plt.plot(np.array(outline[0, :]).flatten(),
np.array(outline[1, :]).flatten(), "-k")
elif config.robot_type == RobotType.circle:
circle = plt.Circle((x, y), config.robot_radius, color="b")
plt.gcf().gca().add_artist(circle)
out_x, out_y = (np.array([x, y]) +
np.array([np.cos(yaw), np.sin(yaw)]) * config.robot_radius)
plt.plot([x, out_x], [y, out_y], "-k")
from IPython import display
def main(gx=10.0, gy=10.0, robot_type=RobotType.circle):
# initial state [x(m), y(m), yaw(rad), v(m/s), omega(rad/s)]
x = np.array([0.0, 0.0, math.pi / 8.0, 0.0, 0.0])
# goal position [x(m), y(m)]
goal = np.array([gx, gy])
# input [forward speed, yaw_rate]
config.robot_type = robot_type
trajectory = np.array(x)
ob = config.ob
fig = plt.figure()
plt.axis("equal")
plt.grid(True)
while True:
dw = calc_dynamic_window(x, config)
u, predicted_trajectory = calc_control_and_trajectory(x, dw, config, goal, ob)
x = motion(x, u, config.dt) # simulate robot
trajectory = np.vstack((trajectory, x)) # store state history
if show_animation:
plt.cla()
plt.plot(predicted_trajectory[:, 0], predicted_trajectory[:, 1], "-g")
plt.plot(x[0], x[1], "xr")
plt.plot(goal[0], goal[1], "xb")
plt.plot(ob[:, 0], ob[:, 1], "ok")
plot_robot(x[0], x[1], x[2], config)
plot_arrow(x[0], x[1], x[2])
display.display(fig)
display.clear_output(wait=True)
# check reaching goal
dist_to_goal = math.hypot(x[0] - goal[0], x[1] - goal[1])
if dist_to_goal <= config.robot_radius:
print("Goal!!")
break
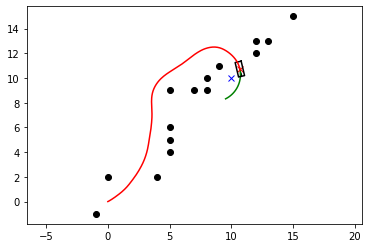
print("Done")
if show_animation:
plt.plot(trajectory[:, 0], trajectory[:, 1], "-r")
display.display(fig)
display.clear_output(wait=True)
main(robot_type=RobotType.rectangle)
附录:Numpy中的Broadcast¶
Numpy中,当运算符两边变量的shape不满足运算符要求时,在满足一些规则下,Numpy会启动Broadcast,例如下面\(a-b\):
import numpy as np
a = np.zeros((3,3))
b = np.array([1])
print(a-b, '\n\n', b-a, '\n')
a.shape, b.shape, (a-b).shape, (b-a).shape
[[-1. -1. -1.]
[-1. -1. -1.]
[-1. -1. -1.]]
[[1. 1. 1.]
[1. 1. 1.]
[1. 1. 1.]]
((3, 3), (1,), (3, 3), (3, 3))
当\(a, b\)的shape一样时,\(a-b\)为element-wise。
当\(a,b\)维度不相等时候,例如a1 = a[:, None]维度从\(3\times3\)变为了\(3\times 1 \times 3\),那么\(a1-b\)就用到了Broadcast性质,即\(a1\)的第一行(其shape为\(1 \times 3\))分别减\(b\)的每一行(每个shape都为\(1 \times 3\)),然后\(a1\)的第二行、第三行……
a = np.eye(3, 3)
b = np.arange(9).reshape(3, 3)
a1 = a[:, None]
print(a1.shape, b.shape, (a1-b).shape, '\n')
a1-b
(3, 1, 3) (3, 3) (3, 3, 3)
array([[[ 1., -1., -2.],
[-2., -4., -5.],
[-5., -7., -8.]],
[[ 0., 0., -2.],
[-3., -3., -5.],
[-6., -6., -8.]],
[[ 0., -1., -1.],
[-3., -4., -4.],
[-6., -7., -7.]]])
所以\(a1, b\)第一维也不需要相等(这里分别是5和3),只需要保证相减的维度是一样的,这里是\((1\times 3) - 3\times (1 \times 3)\):
a = np.eye(5, 3)
b = np.arange(9).reshape(3, 3)
a1 = a[:, None]
print(a1.shape, b.shape, (a1-b).shape, '\n')
a1-b
(5, 1, 3) (3, 3) (5, 3, 3)
array([[[ 1., -1., -2.],
[-2., -4., -5.],
[-5., -7., -8.]],
[[ 0., 0., -2.],
[-3., -3., -5.],
[-6., -6., -8.]],
[[ 0., -1., -1.],
[-3., -4., -4.],
[-6., -7., -7.]],
[[ 0., -1., -2.],
[-3., -4., -5.],
[-6., -7., -8.]],
[[ 0., -1., -2.],
[-3., -4., -5.],
[-6., -7., -8.]]])
同理\(b-a1\)和\(a1-b\)的结果只差个正负号:
a = np.eye(5, 3)
b = np.arange(9).reshape(3, 3)
a1 = a[:, None]
print(a1.shape, b.shape, (b-a1).shape, '\n')
(b-a1)
(5, 1, 3) (3, 3) (5, 3, 3)
array([[[-1., 1., 2.],
[ 2., 4., 5.],
[ 5., 7., 8.]],
[[ 0., 0., 2.],
[ 3., 3., 5.],
[ 6., 6., 8.]],
[[ 0., 1., 1.],
[ 3., 4., 4.],
[ 6., 7., 7.]],
[[ 0., 1., 2.],
[ 3., 4., 5.],
[ 6., 7., 8.]],
[[ 0., 1., 2.],
[ 3., 4., 5.],
[ 6., 7., 8.]]])