ICP¶
![]()
Dependencies¶
# !pip install open3d
# !git clone https://github.com/intel-isl/Open3D
import open3d as o3d
import numpy as np
import matplotlib.pyplot as plt
Load pcd files¶
source = o3d.io.read_point_cloud("Open3D/examples/test_data/ICP/cloud_bin_0.pcd")
target = o3d.io.read_point_cloud("Open3D/examples/test_data/ICP/cloud_bin_1.pcd")
两组点云数量不一样:
points = np.asarray(source.points)
points_tgt = np.asarray(target.points)
points.shape, points_tgt.shape
((198835, 3), (137833, 3))
点云每个点都有颜色,可以直接被用来画图:
source.colors
std::vector<Eigen::Vector3d> with 198835 elements.
Use numpy.asarray() to access data.
import plotly.graph_objects as go
def showCloudPoint(open3d_cloudpoints):
"""
Usage: showCloudPoint(a), showCloudPoint((a, b))
Bug:当总点云数量过大时(336668)在colab中不显示,可以降采样,如下:
sum = (a + b).voxel_down_sample(voxel_size=0.05)
showCloudPoint(sum)
Parameters:
@open3d_cloudpoint_lst: a single or a list of open3d.cpu.pybind.geometry.PointCloud
"""
if not (isinstance(open3d_cloudpoints, list) or isinstance(open3d_cloudpoints, tuple)):
open3d_cloudpoints = [open3d_cloudpoints]
ready_data = []
for open3d_pcd in open3d_cloudpoints:
print(open3d_pcd)
np_pcd = np.asarray(open3d_pcd.points)
colors = np.asarray(open3d_pcd.colors)
x, y, z = np_pcd[:, 0], np_pcd[:, 1], np_pcd[:, 2]
scatter_3d = go.Scatter3d(x=x, y=y, z=z, mode='markers', marker=dict(size=1, color=colors))
ready_data.append(scatter_3d)
fig = go.Figure(ready_data)
fig.show()
# showCloudPoint(source)
由于显示三维数据过于庞大,所以仅展示截图效果:
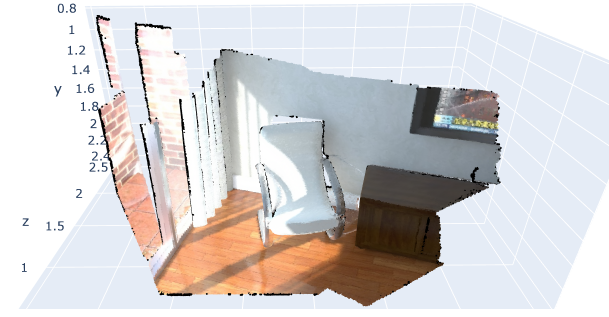
# showCloudPoint(target)

Test¶
a = source + target
a = a.voxel_down_sample(voxel_size=0.05)
Backups¶
import matplotlib.pyplot as plt
from mpl_toolkits import mplot3d
import open3d as o3d
cloud = o3d.io.read_point_cloud("Open3D/examples/test_data/ICP/cloud_bin_0.pcd")
points = np.asarray(cloud.points)
colors = None
if cloud.has_colors():
colors = np.asarray(cloud.colors)
elif cloud.has_normals():
colors = (0.5, 0.5, 0.5) + np.asarray(cloud.normals) * 0.5
else:
geometry.paint_uniform_color((1.0, 0.0, 0.0))
colors = np.asarray(geometry.colors)
# Single View
# Single View
fig = plt.figure(figsize=(12, 9))
ax = fig.add_subplot(projection='3d')
ax.view_init(90, -90)
ax.axis("off")
ax.scatter(points[:,0], points[:,1], points[:,2], s=1, c=colors)
plt.show()

import matplotlib.pyplot as plt
import numpy as np
# Fixing random state for reproducibility
np.random.seed(19680801)
def randrange(n, vmin, vmax):
"""
Helper function to make an array of random numbers having shape (n, )
with each number distributed Uniform(vmin, vmax).
"""
return (vmax - vmin)*np.random.rand(n) + vmin
fig = plt.figure()
ax = fig.add_subplot(projection='3d')
n = 100
# For each set of style and range settings, plot n random points in the box
# defined by x in [23, 32], y in [0, 100], z in [zlow, zhigh].
for m, zlow, zhigh in [('o', -50, -25), ('^', -30, -5)]:
xs = randrange(n, 23, 32)
ys = randrange(n, 0, 100)
zs = randrange(n, zlow, zhigh)
ax.scatter(xs, ys, zs, marker=m)
ax.set_xlabel('X Label')
ax.set_ylabel('Y Label')
ax.set_zlabel('Z Label')
plt.show()